FloatCast Output for Guam: Arcterx2 Deployment -- Fixed Dive Commands
This page contains information related to the remote operation of autonomous oceans floats. The software used here is called FloatCast. Each section below contains relevant information from various points in the FloatCast workflow. The components highlighted are related to (1) the ocean surface flow forecasts, (2) the optimized float command files, (3) the float trajectory predictions, (4) and the scoring of candidate command sets. Data from all or some of these components may be posted below.
Last updated: 01-Nov-2025 15:50:43 (UTC)
Contents
(1) Ocean Surface Flow Forecasts
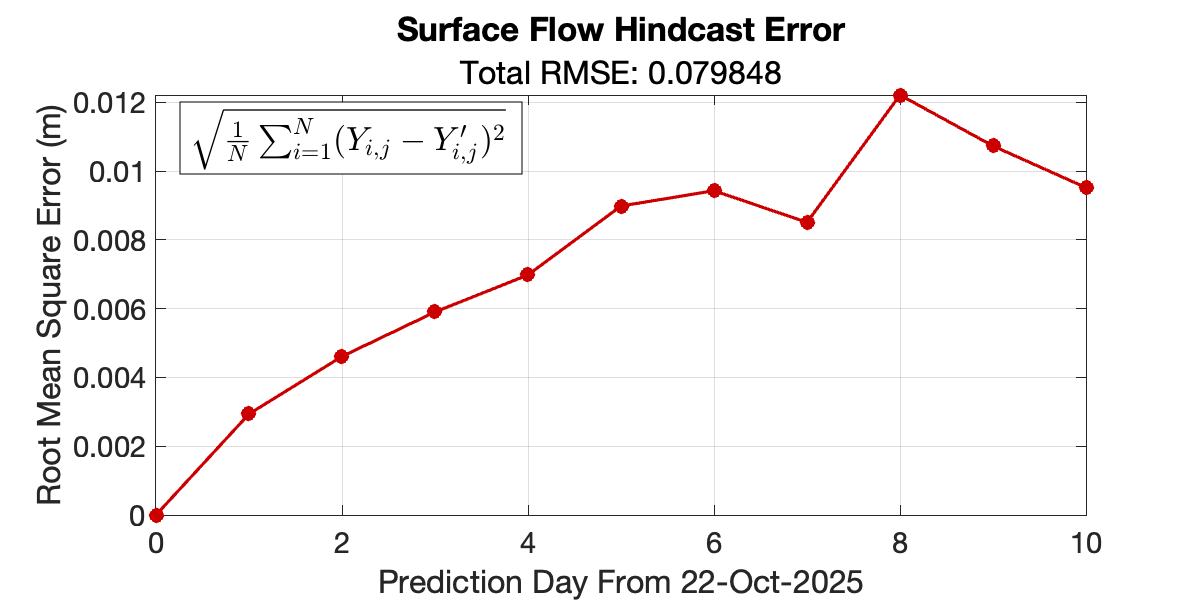
Forecasts of ocean surface flow are generated using an Echo State Network (ESN). The ESN predicts Sea Level Anomaly (SLA), which is converted to surface flow. Hindcast data below can be used to assess prediction skill. The forecast data below can be used to optimize future control strategies. See available plots in the list below.
{kind=link}
{kind=link}
{kind=link}
(2) Optimized Float Commands
Suggested float command sets are included below. These commands have been optimized with respect to the mapping error scoring metric while using ocean surface flow forecasts to inform trajectory predictions.
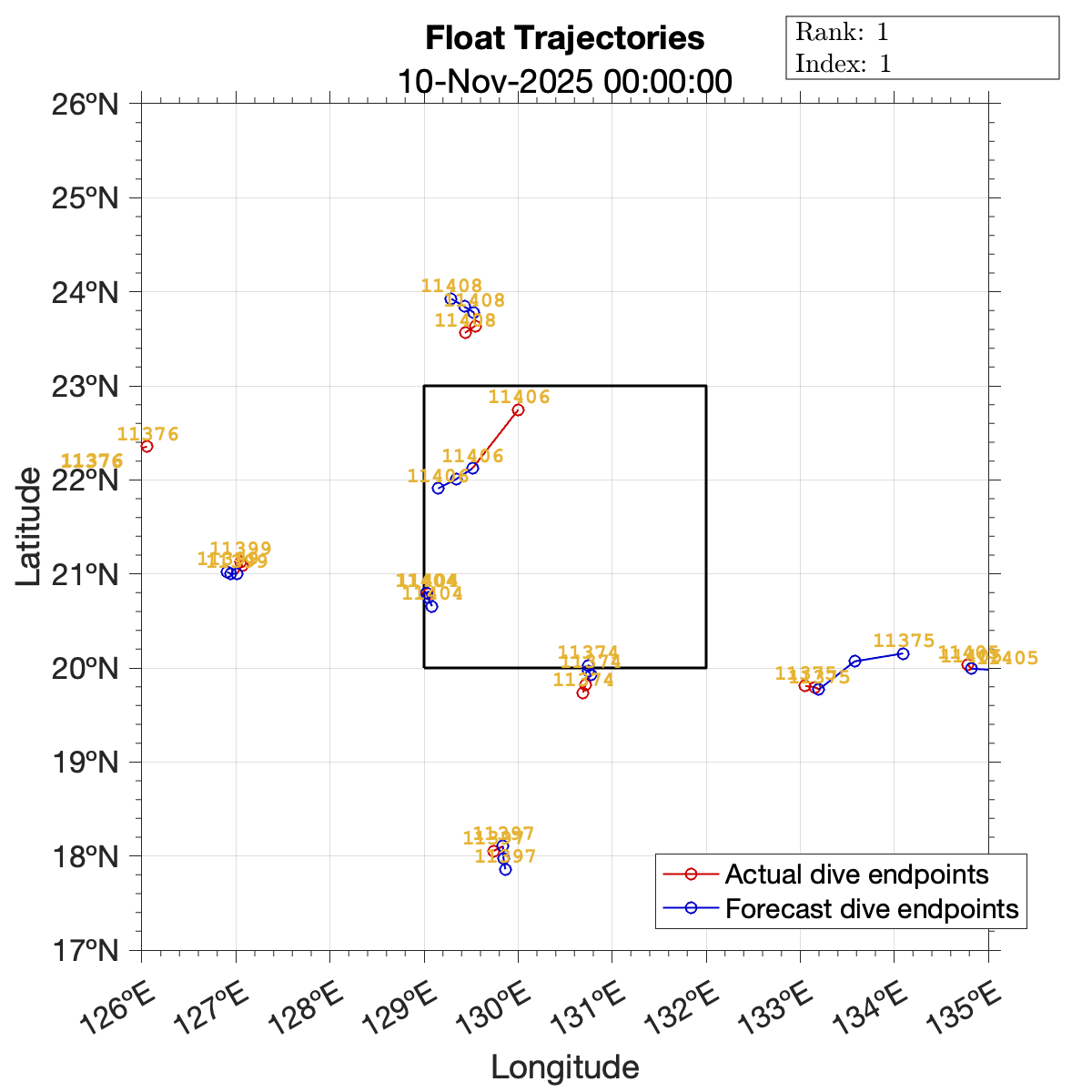
(3) Float Trajectory Predictions
Plots showing the predicted float trajectories are generated based on a particle model of the vehicle dynamics. In the model, the float moves in the same direction as the surface flow, but with a magnitude that decays exponentially with depth. List items below with the same number correspond to the same prediction data.
{kind=link}
{kind=link}